
Modeling with Pyomo#
This page is adapted from our process control class at Notre Dame; it was developed by Prof. Jeff Kantor.
# Install Pyomo and solvers for Google Colab
import sys
if "google.colab" in sys.modules:
!wget "https://raw.githubusercontent.com/IDAES/idaes-pse/main/scripts/colab_helper.py"
import colab_helper
colab_helper.install_idaes()
colab_helper.install_ipopt()
# Set plotting defaults
import matplotlib.pyplot as plt
SMALL_SIZE = 14
MEDIUM_SIZE = 16
BIGGER_SIZE = 18
plt.rc('font', size=SMALL_SIZE) # controls default text sizes
plt.rc('axes', titlesize=SMALL_SIZE) # fontsize of the axes title
plt.rc('axes', labelsize=MEDIUM_SIZE) # fontsize of the x and y labels
plt.rc('xtick', labelsize=SMALL_SIZE) # fontsize of the tick labels
plt.rc('ytick', labelsize=SMALL_SIZE) # fontsize of the tick labels
plt.rc('legend', fontsize=SMALL_SIZE) # legend fontsize
plt.rc('figure', titlesize=BIGGER_SIZE) # fontsize of the figure title
plt.rc('lines', linewidth=3)
In this notebook, we will review Pyomo syntax solving optimization problems with our TCLab model.
Let’s start by defining some model coefficients:
# parameters
alpha = 0.00016 # watts / (units P * percent U1)
P = 200 # P units
Ua = 0.050 # heat transfer coefficient from heater to environment
CpH = 2.2 # heat capacity of the heater (J/deg C)
CpS = 1.9 # heat capacity of the sensor (J/deg C)
Ub = 0.021 # heat transfer coefficient from heater to sensor
Tamb = 21.0 # ambient temperature
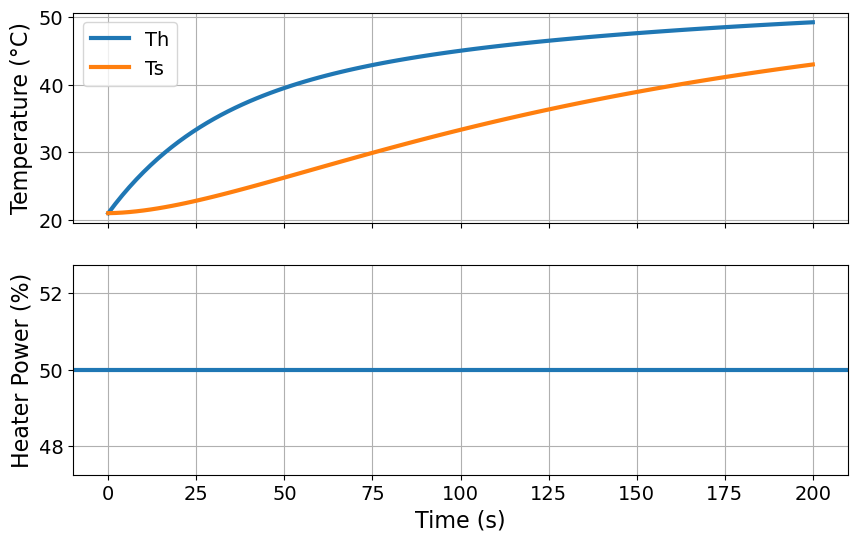
Simulate a Step Test (ramp)#
We will start by simulating our TCLab model. In other words, we will solve the following optimization problem with zero degrees of freedom:
Here “s.t.” means “subject to”, i.e., the constraints.
# final time [seconds]
tf = 200
# control input [%]
u = 50.0
# import Pyomo library
import pyomo.environ as pyo
import pyomo.dae as dae
# Create a Pyomo model
m = pyo.ConcreteModel('TCLab Heater/Sensor')
# Define time domain
m.t = dae.ContinuousSet(bounds=(0, tf))
# Define the state variables as a function of time
m.Th = pyo.Var(m.t)
m.Ts = pyo.Var(m.t)
# Define the derivatives of the state variables
m.dTh = dae.DerivativeVar(m.Th)
m.dTs = dae.DerivativeVar(m.Ts)
# Define the first differential equation
def heater1(m, t):
return (
CpH * m.dTh[t]
== Ua * (Tamb - m.Th[t]) + Ub * (m.Ts[t] - m.Th[t]) + alpha * P * u
)
m.heater1_con = pyo.Constraint(m.t, rule=heater1)
# Define the second differential equation
def sensor1(m, t):
return CpS * m.dTs[t] == Ub * (m.Th[t] - m.Ts[t])
m.sensor1_con = pyo.Constraint(m.t, rule=sensor1)
# Set the initial conditions
m.Th[0].fix(Tamb)
m.Ts[0].fix(Tamb)
# Apply a finite difference formula to numerically integrate the differential equations
pyo.TransformationFactory('dae.finite_difference').apply_to(m, nfe=100, wrt=m.t)
# Call our nonlinear optimization/equation solver, Ipopt
pyo.SolverFactory('ipopt').solve(m)
# Plot the results
fig, ax = plt.subplots(2, 1, figsize=(10, 6), sharex=True)
# Plot 1: Temperature
ax[0].plot(m.t, [m.Th[t]() for t in m.t], label="Th")
ax[0].plot(m.t, [m.Ts[t]() for t in m.t], label="Ts")
ax[0].legend()
ax[0].set_ylabel("Temperature (°C)")
ax[0].grid()
# Plot 2: Heater Power
ax[1].axhline(u, label="Power")
ax[1].set_xlabel("Time (s)")
ax[1].set_ylabel("Heater Power (%)")
ax[1].grid()
The code below to access and print results from the Pyomo model:
for i, t in enumerate(m.t):
# Only print every 10 timesteps
if i % 10 == 0:
print(
"Th=",
round(pyo.value(m.Th[t]), 2),
"°C and Ts=",
round(pyo.value(m.Ts[t]), 2),
"°C at time",
round(t, 2),
"seconds.",
)
Th= 21.0 °C and Ts= 21.0 °C at time 0 seconds.
Th= 31.56 °C and Ts= 22.28 °C at time 20.0 seconds.
Th= 37.51 °C and Ts= 24.82 °C at time 40.0 seconds.
Th= 41.08 °C and Ts= 27.73 °C at time 60.0 seconds.
Th= 43.39 °C and Ts= 30.63 °C at time 80.0 seconds.
Th= 45.01 °C and Ts= 33.32 °C at time 100.0 seconds.
Th= 46.22 °C and Ts= 35.76 °C at time 120.0 seconds.
Th= 47.18 °C and Ts= 37.92 °C at time 140.0 seconds.
Th= 47.97 °C and Ts= 39.83 °C at time 160.0 seconds.
Th= 48.64 °C and Ts= 41.51 °C at time 180.0 seconds.
Th= 49.21 °C and Ts= 42.97 °C at time 200 seconds.
Uncomment and run the code below to see the details of the Pyomo model:
# m.pprint()
Activity: Optimization by Trial-and-Error#
Modify the code above to find the value for u that causes Th to reach 60 °C at the final time. In others words, we are using trial and error to solve the following optimization problem:
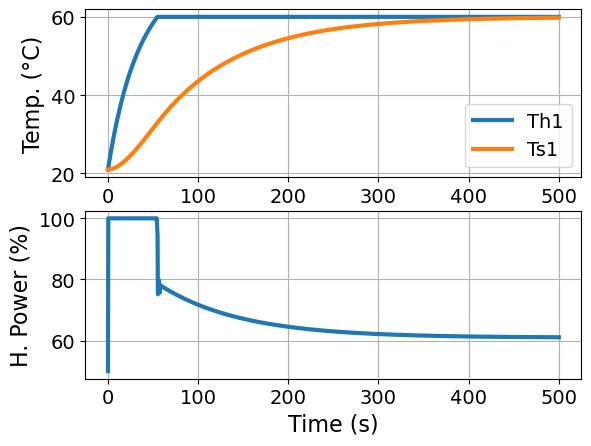
Feedforward Optimal Control#
An optimal control policy minimizes the differences
subject to constraints
This is different than our example above because we allow \(u\) to have a unique value for each timestep.
Note that pyomo.dae has an Integral object to help with these situations.
# Set point, deg C
SP = 60.0
# Final time, seconds
tf = 500.0
# Create a Pyomo model
m = pyo.ConcreteModel('TCLab Heater/Sensor')
# Define time domain
m.t = dae.ContinuousSet(bounds=(0, tf))
# Define the state variables as a function of time
m.Th1 = pyo.Var(m.t)
m.Ts1 = pyo.Var(m.t)
# Define the derivatives of the state variables
m.dTh1 = dae.DerivativeVar(m.Th1)
m.dTs1 = dae.DerivativeVar(m.Ts1)
# Define the control variable (heater power) as a function of time
m.u1 = pyo.Var(m.t, bounds=(0, 100))
# Define the integral of the squared error
@m.Integral(m.t)
def ise(m, t):
return (SP - m.Th1[t]) ** 2
# Define the first differential equation
# Notice we are defining the equation using the decorator syntax
@m.Constraint(m.t)
def heater1(m, t):
return (
CpH * m.dTh1[t]
== Ua * (Tamb - m.Th1[t]) + Ub * (m.Ts1[t] - m.Th1[t]) + alpha * P * m.u1[t]
)
# Define the second differential equation
@m.Constraint(m.t)
def sensor1(m, t):
return CpS * m.dTs1[t] == Ub * (m.Th1[t] - m.Ts1[t])
# Set the initial conditions
m.Th1[0].fix(Tamb)
m.Ts1[0].fix(Tamb)
# Define the objective function
@m.Objective(sense=pyo.minimize)
def objective(m):
return m.ise
# Apply a collocation method to numerically integrate the differential equations
pyo.TransformationFactory('dae.collocation').apply_to(m, nfe=200, wrt=m.t)
# Call our nonlinear optimization/equation solver, Ipopt
pyo.SolverFactory('ipopt').solve(m)
# We are going to repeat plotting two more times,
# so let's define a function
def plot_results(m):
"""
Plot results from Pyomo optimization
Arguments:
m: Pyomo model
Returns:
Nothing
"""
# Plot the results
fig, ax = plt.subplots(2, 1)
ax[0].plot(m.t, [m.Th1[t]() for t in m.t], label="Th1")
ax[0].plot(m.t, [m.Ts1[t]() for t in m.t], label="Ts1")
ax[0].legend()
ax[0].set_xlabel("Time (s)")
ax[0].set_ylabel("Temp. (°C)")
ax[0].grid()
ax[1].plot(m.t, [m.u1[t]() for t in m.t], label="U1")
ax[1].set_xlabel("Time (s)")
ax[1].set_ylabel("H. Power (%)")
ax[1].grid()
plot_results(m)
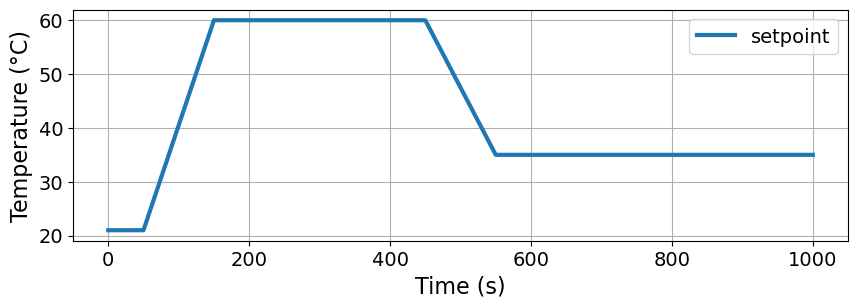
Controlling to a Reference Tractory#
Now let’s consider optimizing the control input \(u(t)\) to track a more sophisticated time-varying setpoint signal \(SP(t)\).
Python function r(t) uses numpy.interp to compute values of the reference trajectory at any point in time.
import numpy as np
# time grid
tf = 1000
dt = 2
n = round(tf / dt)
t_grid = np.linspace(0, 1000, n + 1)
# ambient temperature
Tamb = 21
# setpoint/reference
def r(t):
return np.interp(t, [0, 50, 150, 450, 550], [Tamb, Tamb, 60, 60, 35])
# plot the setpoint function
fig, ax = plt.subplots(1, 1, figsize=(10, 3))
ax.plot(t_grid, r(t_grid), label="setpoint")
ax.set_ylabel('Temperature (°C)')
ax.set_xlabel("Time (s)")
ax.legend()
ax.grid(True)
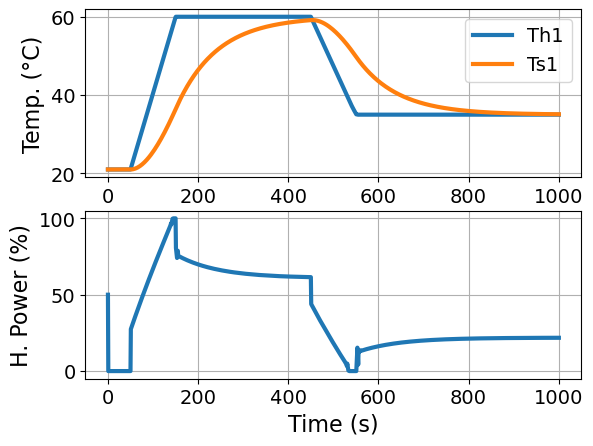
Now let’s solve the optimal control problem to find a control policy \(u(t)\) for the interval \(t_0 \leq t \leq t_f\) which causes the output \(T_H(t)\) to track a desired setpoint or reference tracjectory \(SP(t)\).
# Create a Pyomo model
m = pyo.ConcreteModel('TCLab Heater/Sensor')
# Define time domain
m.t = dae.ContinuousSet(bounds=(0, tf))
# Define the state variables as a function of time
m.Th1 = pyo.Var(m.t)
m.Ts1 = pyo.Var(m.t)
# Define the derivatives of the state variables
m.dTh1 = dae.DerivativeVar(m.Th1)
m.dTs1 = dae.DerivativeVar(m.Ts1)
# Define the control variable (heater power) as a function of time
m.u1 = pyo.Var(m.t, bounds=(0, 100))
# Define the integral of the squared error
@m.Integral(m.t)
def ise(m, t):
return (r(t) - m.Th1[t]) ** 2
# Define the first differential equation
@m.Constraint(m.t)
def heater1(m, t):
return (
CpH * m.dTh1[t]
== Ua * (Tamb - m.Th1[t]) + Ub * (m.Ts1[t] - m.Th1[t]) + alpha * P * m.u1[t]
)
# Define the second differential equation
@m.Constraint(m.t)
def sensor1(m, t):
return CpS * m.dTs1[t] == Ub * (m.Th1[t] - m.Ts1[t])
# Fix the initial conditions
m.Th1[0].fix(Tamb)
m.Ts1[0].fix(Tamb)
# Define the objective function
@m.Objective(sense=pyo.minimize)
def objective(m):
return m.ise
# Apply a collocation method to numerically integrate the differential equations
pyo.TransformationFactory('dae.collocation').apply_to(m, nfe=200, wrt=m.t)
# Call our nonlinear optimization/equation solver, Ipopt
pyo.SolverFactory('ipopt').solve(m)
plot_results(m)
Helper Functions#
To simplify the code, we have prepared some helper functions to assemble Pyomo models and manipulate data. Please spend the next 5 minutes studying tclab_pyomo.py
Take Away Messages#
This example shows two things:
Pyomo is a great environment to formulate and solve optimization problems.
Predictive models are critical for intelligent decision making.
For the result of the workshop, we will use Pyomo to:
Estimate the model parameters in the TCLab model from experimental data.
Determine the most informative next experiment to reduce uncertainty in the model parameters.